

nRF24L01 (8 PIN) - (ID:236)
Написано
admin
,
16 May 2015
·
2007 Просмотров
 Радиомодуль NRF24L01+ способен передать информацию со скоростью передачи до 2 Mbps на расстояние до 100 метров.
Радиомодуль NRF24L01+ способен передать информацию со скоростью передачи до 2 Mbps на расстояние до 100 метров.Его можно использовать для беспроводной передачи информации с одной платы Arduino на другую. Данная версия платы радиомодуля имеет восьми контактный разъем.
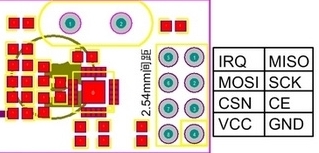
Обозначение выводов :
GND - подключение к общему проводу.
VCC - подключение к выводу +3,3 Вольт.
CE - подключение к выводу 8 Arduino.
CSN - подключение к выводу 7 Arduino.
MISO - подключение к выводу 12 Arduino.
MOSI - подключение к выводу 11 Arduino.
SCK - подключение к выводу 13 Arduino.
Вывод IRQ использоваться не будет.
Библиотека: Радиомодуль nRF24L01 (ID:460)
Последние обновленные 28 Oct 2022 01:13
После скачивания файла архива Mirf.zip, поместите содержимое архива в папку libraries, которая находится в папке с программой Arduino.
Для работы нам понадобится две платы Arduino.
Попробуем с помощью радиомодуля передать информацию с одной платы Arduino на другую.
Примерный скетч передатчика - сервера выглядит следующим образом:
/**
* An Mirf example which copies back the data it recives.
*
* Pins:
* Hardware SPI:
* MISO -> 12
* MOSI -> 11
* SCK -> 13
*
* Configurable:
* CE -> 8
* CSN -> 7
*
*/
#include <SPI.h>
#include <Mirf.h>
#include <nRF24L01.h>
#include <MirfHardwareSpiDriver.h>
void setup(){
Serial.begin(9600);
/*
* Set the SPI Driver.
*/
Mirf.spi = &MirfHardwareSpi;
/*
* Setup pins / SPI.
*/
Mirf.init();
/*
* Configure reciving address.
*/
Mirf.setRADDR((byte *)"serv1");
/*
* Set the payload length to sizeof(unsigned long) the
* return type of millis().
*
* NB: payload on client and server must be the same.
*/
Mirf.payload = sizeof(unsigned long);
/*
* Write channel and payload config then power up reciver.
*/
Mirf.config();
Serial.println("Listening...");
}
void loop(){
/*
* A buffer to store the data.
*/
byte data[Mirf.payload];
/*
* If a packet has been recived.
*
* isSending also restores listening mode when it
* transitions from true to false.
*/
if(!Mirf.isSending() && Mirf.dataReady()){
Serial.println("Got packet");
/*
* Get load the packet into the buffer.
*/
Mirf.getData(data);
/*
* Set the send address.
*/
Mirf.setTADDR((byte *)"clie1");
/*
* Send the data back to the client.
*/
Mirf.send(data);
/*
* Wait untill sending has finished
*
* NB: isSending returns the chip to receving after returning true.
*/
Serial.println("Reply sent.");
}
}Примерный скетч приемника - клиента выглядит следующим образом:
/**
* A Mirf example to test the latency between two Ardunio.
*
* Pins:
* Hardware SPI:
* MISO -> 12
* MOSI -> 11
* SCK -> 13
*
* Configurable:
* CE -> 8
* CSN -> 7
*
* Note: To see best case latency comment out all Serial.println
* statements not displaying the result and load
* 'ping_server_interupt' on the server.
*/
#include <SPI.h>
#include <Mirf.h>
#include <nRF24L01.h>
#include <MirfHardwareSpiDriver.h>
void setup(){
Serial.begin(9600);
/*
* Setup pins / SPI.
*/
/* To change CE / CSN Pins:
*
* Mirf.csnPin = 9;
* Mirf.cePin = 7;
*/
/*
Mirf.cePin = 7;
Mirf.csnPin = 8;
*/
Mirf.spi = &MirfHardwareSpi;
Mirf.init();
/*
* Configure reciving address.
*/
Mirf.setRADDR((byte *)"clie1");
/*
* Set the payload length to sizeof(unsigned long) the
* return type of millis().
*
* NB: payload on client and server must be the same.
*/
Mirf.payload = sizeof(unsigned long);
/*
* Write channel and payload config then power up reciver.
*/
/*
* To change channel:
*
* Mirf.channel = 10;
*
* NB: Make sure channel is legal in your area.
*/
Mirf.config();
Serial.println("Beginning ... ");
}
void loop(){
unsigned long time = millis();
Mirf.setTADDR((byte *)"serv1");
Mirf.send((byte *)&time);
while(Mirf.isSending()){
}
Serial.println("Finished sending");
delay(10);
while(!Mirf.dataReady()){
//Serial.println("Waiting");
if ( ( millis() - time ) > 1000 ) {
Serial.println("Timeout on response from server!");
return;
}
}
Mirf.getData((byte *) &time);
Serial.print("Ping: ");
Serial.println((millis() - time));
delay(1000);
}Подключаем передатчик к одной плате Arduino, относим его на некоторое расстояние.Подключаем приемник к другой плате Arduino, включаем монитор порта и видим каждую секунду изменяющиеся цифры . Теперь можно поэкспериментировать. Проверьте, как положение приемника и передатчика влияет на дальность связи, какая максимальная дальность связи.
Ссылка на витрину магазина http://dvrobot.ru/238/299/428.html.











