

Радиомодуль NRF905 (ID:165)
Написано
admin
,
11 May 2015
·
6196 Просмотров
 Радиомодуль NRF905 способен передать информацию со скоростью передачи до 50 Kbps на расстояние до 400 метров. Его можно использовать для беспроводной передачи информации с одной платы Arduino на другую. Плата радиомодуля имеет четырнадцати контактный разъем и отдельный разъем для подключения антенны.
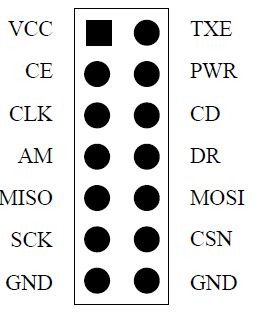
Радиомодуль NRF905 способен передать информацию со скоростью передачи до 50 Kbps на расстояние до 400 метров. Его можно использовать для беспроводной передачи информации с одной платы Arduino на другую. Плата радиомодуля имеет четырнадцати контактный разъем и отдельный разъем для подключения антенны.Обозначение выводов :
GND - подключение к общему проводу.
VCC - подключение к выводу +3,3 Вольт.
CE - подключение к выводу 7 Arduino.
PWR - подключение к выводу 8 Arduino.
TxEN - подключение к выводу 9 Arduino.
CD - подключение к выводу 2 Arduino.
DR - подключение к выводу 3 Arduino.
CSN - подключение к выводу 10 Arduino.
MISO - подключение к выводу 12 Arduino.
MOSI - подключение к выводу 11 Arduino.
SCK - подключение к выводу 13 Arduino.
Остальные выводы использоваться не будут.
Библиотека: Радиомодуль NRF905 (ID:165)
Последние обновленные 28 Oct 2022 01:18
После скачивания файла архива nrf905.zip, поместите содержимое архива в папку libraries, которая находится в папке с программой Arduino.
Для работы нам понадобится две платы Arduino.
Попробуем с помощью радиомодуля передать информацию с одной платы Arduino на другую.
Примерный скетч передатчика - сервера выглядит следующим образом:
/*
* Wait for data and reply.
*
* 7 -> CE
* 8 -> PWR
* 9 -> TXE
* 2 -> CD
* 3 -> DR
* 10 -> CSN
* 12 -> SO
* 11 -> SI
* 13 -> SCK
*/
#include <nRF905.h>
#include <SPI.h>
#define RXADDR 0x586F2E10 // Address of this device (4 bytes / long data type)
#define TXADDR 0xFE4CA6E5 // Address of device to send to (4 bytes / long data type)
void setup()
{
// Start up
nRF905_init();
// Set address of this device
nRF905_setRXAddress(RXADDR);
// Put into receive mode
nRF905_receive();
Serial.begin(9600);
Serial.println("Server started");
}
void loop()
{
Serial.println("Waiting for ping...");
// Make buffer for data
byte buffer[NRF905_MAX_PAYLOAD];
// Wait for data
while(!nRF905_getData(buffer, sizeof(buffer)));
// Set address of device to send to
nRF905_setTXAddress(TXADDR);
// Set payload data (reply with data received)
nRF905_setData(buffer, sizeof(buffer));
// Send payload (send fails if other transmissions are going on, keep trying until success)
while(!nRF905_send());
// Put back into receive mode
nRF905_receive();
Serial.println("Got ping");
}
Примерный скетч приемника - клиента выглядит следующим образом:
/*
* Time how long it takes to send some data and get a reply
* Should be around 14-16ms with default settings.
*
* 7 -> CE
* 8 -> PWR
* 9 -> TXE
* 2 -> CD
* 3 -> DR
* 10 -> CSN
* 12 -> SO
* 11 -> SI
* 13 -> SCK
*/
#include <nRF905.h>
#include <SPI.h>
#define RXADDR 0xFE4CA6E5 // Address of this device (4 bytes / long data type)
#define TXADDR 0x586F2E10 // Address of device to send to (4 bytes / long data type)
#define TIMEOUT 1000 // 1 second ping timeout
// Just some random data to send
byte data[NRF905_MAX_PAYLOAD] = {
0x0A,
0x68,
0x45,
0xFA
};
void setup()
{
// Start up
nRF905_init();
// Set address of this device
nRF905_setRXAddress(RXADDR);
// Put into receive mode
nRF905_receive();
Serial.begin(9600);
Serial.println("Client started");
}
void loop()
{
unsigned long startTime = millis();
// Set address of device to send to
nRF905_setTXAddress(TXADDR);
// Set payload data
nRF905_setData(data, sizeof(data));
// Send payload (send fails if other transmissions are going on, keep trying until success)
while(!nRF905_send());
// Put into receive mode
nRF905_receive();
// Make buffer for reply
byte buffer[NRF905_MAX_PAYLOAD];
bool success;
// Wait for reply with timeout
unsigned long sendStartTime = millis();
while(!(success = nRF905_getData(buffer, sizeof(buffer))) && millis() - sendStartTime < TIMEOUT);
if(success)
{
unsigned int totalTime = millis() - startTime;
Serial.print("Ping time: ");
Serial.print(totalTime);
Serial.println("ms");
}
else
Serial.println("Ping timed out");
delay(1000);
}
Подключаем передатчик- сервер к одной плате Arduino, относим его на некоторое расстояние.Подключаем приемник - клиент к другой плате Arduino, включаем монитор порта и видим каждую секунду изменяющиеся цифры . Теперь можно поэкспериментировать. Проверьте, как положение антенн влияет на дальность связи, какая максимальная дальность связи.
Ссылка на витрину магазина http://dvrobot.ru/238/431.html











