

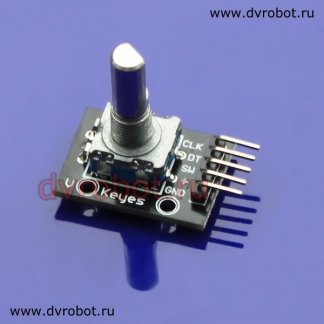
 Датчик- энкодер представляет собой небольшую платку с установленным на ней вращающимся переключателем, пяти контактным разъемом.
Датчик- энкодер представляет собой небольшую платку с установленным на ней вращающимся переключателем, пяти контактным разъемом.+ - контакт для подключения напряжения питания 5 Вольт.
GND- контакт для подключения общего провода.
DT- выводы с переключателя.
CLK- выводы с переключателя.
SW- выводы с переключателя.
Энкодер содержит внутри две пары контактов. При вращении ручки, первая пара контактов замыкается чуть раньше второй пары, соответственно размыкается тоже чуть раньше второй пары. Такая особенность расположения контактов позволяет определить, в какую сторону происходит вращение ручки. Заодно можно подсчитать, сколько оборотов сделала ручка. Если известно, сколько всего импульсов поступило с контактов валкодера и известно, сколько импульсов на один оборот ручки имеет сам валкодер. Данный тип валкодера имеет 20 импульсов на один оборот ручки.
Один из примеров использования датчика будет такой:
Подключаем питание 5 Вольт к плате валкодера
SLK вывод платы энкодера подключаем к Arduino на цифровой вход 4.
DT вывод платы энкодера подключаем к Arduino на аналоговый вход 3.
Запишем в Arduino вот такой скетч:
int val;
int encoderA = 3;
int encoderB = 4;
int encoderPos = 0;
int encoderLast = LOW;
int n = LOW;
void setup() {
pinMode (encoderA,INPUT);
pinMode (encoderB,INPUT);
Serial.begin (9600);
}
void loop() {
n = digitalRead(encoderA);
if ((encoderLast == LOW) && (n == HIGH)) {
if (digitalRead(encoderB) == LOW) {
encoderPos--;
}
else {
encoderPos++;
}
Serial.println (encoderPos);
}
encoderLast = n;
}Включаем монитор порта, вращаем ручку энкодера и наблюдаем бегущие цифры.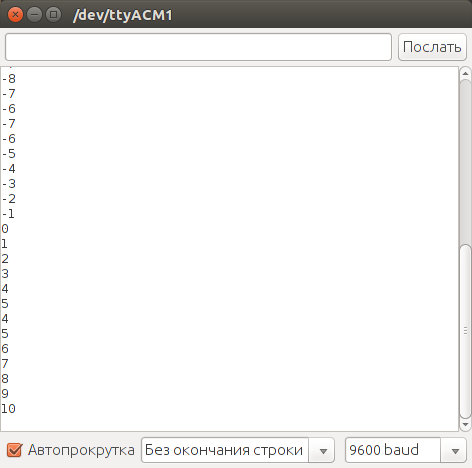
Ссылка на витрину магазина http://dvrobot.ru/238/367.html











